Summary | ROS2 I |
[ ROS2 ] ROS 기초 I (Node, Package)
최근 ‘딥러닝시스템’이란 과목을 수강하면서 간단한 텀프로젝트를 진행하고 있다.
해당 프로젝트는 NVDIA Jestson Nano 보드를 이용하여 Objection Detection 하는 것이 목표이며, 본 포스트는 프로젝트 진행에 있어 보다 높은 이해를 위해 정리하는 목적으로 작성되었다.
ROS Robot Operating System
ROS란?
"로보틱스 소프트웨어 개발을 전 세계 레벨에서 공통 작업이 가능하도록 하는 환경을 구축하자!"
ROS는 로봇 공학 애플리케이션을 위한 오픈 소스 소프트웨어 개발 킷 (SDK)으로, 로봇을 개발하는 과정에서 기능의 구현, 하드웨어의 통제 등을 위해 사용된다. 이는 연구에서 배포 및 생산에 이르기까지 모든 산업 분야의 개발자에게 표준 소프트웨어 플랫폼을 제공하는 것을 목적으로 만들어졌다.
[ ROS의 예시 ]
- 서빙 로봇 (KT AO Robot, 애슐리퀸즈 등)
- 호출 및 지정 테이블 목적지 지정
- 목적지까지 자율 주행 및 장애물 회피
- 음식 서빙 및 식기 회수 후 복귀 및 반복
- 베달 로봇 (배민로봇 딜리)
- 음식 픽업 및 배달지 지정
- 목적지까지 자율주행 및 장애물 회피
- 배달 완료 후 다시 반복
- 바리스타 로봇 (성수동 카페 Cafe.bot)
- 고객의 주문 접수
- 집게 손을 이용해 Pick & Place
- 가판대에 내려둔 뒤 다시 반복
ROS의 특징
ROS는 로보틱스 연구 및 개발 과정에서 코드를 Package화하여 재사용을 극대화하는 것에 초점을 맞춘 SDK이다. 이를 위해 Node 단위의 분산 프로세스, 공유 및 재배포를 쉽게 하기 위한 Package 단위 관리, 다양한 프로그래밍 언어 지원 기능 등을 갖추었다.
- 다양한 운영체제 지원 (Linux, Mac OS, Window 등)
- 다양한 프로그래밍 언어 지원 (Python, C 등)
- Package 지향으로 인한 높은 재사용성
- 활발한 커뮤니티 교류
- 오픈 소스
임베디드 보드 Embedded Board
이번 프로젝트에서 내가 사용하는 임베디드 보드는 NVDIA에서 나온 Jetson Nano 보드이다. 임베디드 보드란 뭘까?
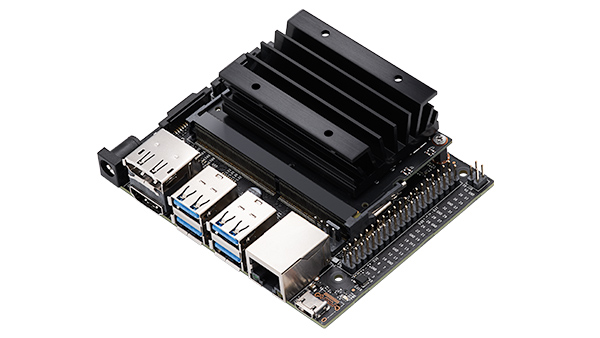
임베디드 보드는 로봇 개발에 사용되는 대표적인 HW이다. PC 이외의 장비에 사용되는 칩이 내장된 PCB 등의 메인보드를 말하는데, 다음과 같이 불리기도 한다.
- Single Board
- CPU, 램 등의 PC의 기본적 부품이 한 보드에 내장된 형태의 메인보드
- Development Board
- 센서와 구동계 등을 연결하고 코딩을 하는 등의 특정 시스템 개발을 목적으로 만든 메인보드
Node와 Package
Node란?
Node는 실행 가능한 최소 단위의 프로세서를 말한다.
로봇 개발을 위해서는 로봇을 구성하는 여러 센서들과 이 센서들을 통해 얻은 센서 데이터를 바탕으로 지속적으로 판단하고 동작하는 시스템이 필요하다. 그래서 필요한 게 Node.
각 노드의 역할을 목적에 맞게 세분화시켜서 각 노드들 간의 의존성을 줄이고 독립성을 높여서 다른 목적의 작업에서도 일부 노드를 재사용할 수 있다.
+) Topic, Service, Action
뒤에서 다룰 예정이지만 간단하게 짚고 넘어가자.
Node들 사이에 Topic, Service, Action, Parameter를 통해 다른 노드로 데이터를 주고 받을 수 있다.
Package란?
Package는 ROS를 구성하는 기본 단위이자 개발 단위이다.
하나 이상의 Node를 포함하고 있으며, 다른 패키지의 Node를 실행하기 위한 설정 파일, 프로세스를 실행할 수 있는 ROS 의존성 라이브러리 등을 가진다. Package는 다음과 같이 바라볼 수 있다.
- 파일 관점
- 관련된 라이브러리, 모델링 파일, 설정 파일을 모아둔 폴더
- 기능 관점
- 시뮬레이션, HW 관련, 모델링, 원격 조종 등으로 분리시킨 모듈
또, colcon build가 수행되는 빌드의 단위이기도 하다.
Package 만들기 : ament
$ ros2 pkg create --build-type ament-type ament_python <pkg_name> --dependencies rclpy <dependency>
위의 코드를 실행하면 빌드를 위한 기본 파일 구조를 만들 수 있다. colcon build를 통해 빌드하고, 검사 후 build 폴더로 바로가기를 생성한다.
Node, Package 관련 명령어
Node의 실행
$ ros2 run <node_name>
실행 중 Node들의 리스트 확인
$ ros2 node list
특정 Node 정보 살펴보기
$ ros2 node info <node_name>
사용가능 Package 리스트 확인
$ ros2 pkg list
사용하고 싶은 패키지에서 사용가능한 Node 확인
$ ros2 pkg executables <package_name>
Next Post..
다음 포스트에서는 Topic, Service, Action에 대해 정리할 예정이다.
💙 You need to log in to GitHub to write comments. 💙
If you can't see comments, please refresh page(F5).