[ DL ] 고급 합성곱 신경망 구조
비전 시스템을 위한 딥러닝 Deep Learning for Vision Systems 전공 수업을 들으며 배운 내용을 정리하고자 한다.
본 포스트에서는 고급 합성곱 신경망 구조 Advanced CNN Architectures에 대해 정리하겠다.
CNN의 디자인 패턴
CNN을 이용해 딥러닝 모델을 설계할 때 일반적으로 다음과 같은 패턴 구조를 따른다.
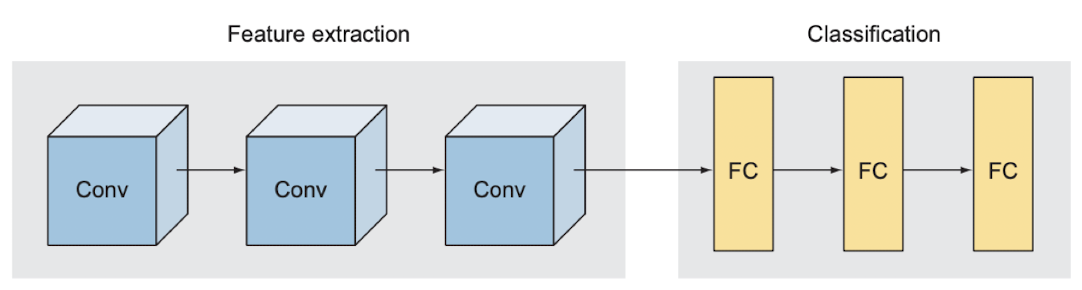
1️⃣ 첫 번째 패턴 : 특징 추출과 분류
- 합성곱 신경망은 크게 특징 추출을 맡는 부분과 분류를 맡는 부분으로 나뉨
- 특징 추출 : 일련의 합성곱층 Conv
- 분류 : 전결합층 FC
- LeNet, AlexNet, 인셉션, ResNet 등
2️⃣ 두 번째 패턴 : 이미지 깊이 🔼, 이미지 크기 🔽
- 모든 층의 입력은 이미지
- 각 층은 이전 층에서 생성된 새로운 이미지에 합성곱 연산을 적용함
- 입력층에서 깊이가 1이면 회색조 (색상 채널)
- 이후 계층에서 깊이는 이전 층에서 추출된 특징을 나타내는 특징 맵이 됨
- 모든 합성곱 신경망에서 합성곱층을 지날 때마다 이미지의 깊이가 증가하고 크기는 감소하는 경향
3️⃣ 세 번째 패턴 : 전결합층 FC
- 대부분 모든 FC층은 유닛수가 같거나, 유닛 수가 감소하는 경향
- 유닛수가 증가하는 경우는 거의 없음
- 이어지는 모든 FC층의 유닛을 같게 해서 신경망의 학습 능력이 저해되는 현상은 발생되지 않음
합성곱 신경망 살펴보기
📌 LeNet -5
- 1998년 르쿤 연구진 발표
- 직관적인 구조
- 가중치를 가진 5개의 층 > 모델의 계산 복잡도와 직결
- 3개의 합성곱층
- 2개의 전결합층
- pooling 층은 가중치를 가지지 않음
- 1998년 당시, ReLU는 발견되기 이전 > tanh와 sigmoid 함수를 쓰는 것이 일반적이었음
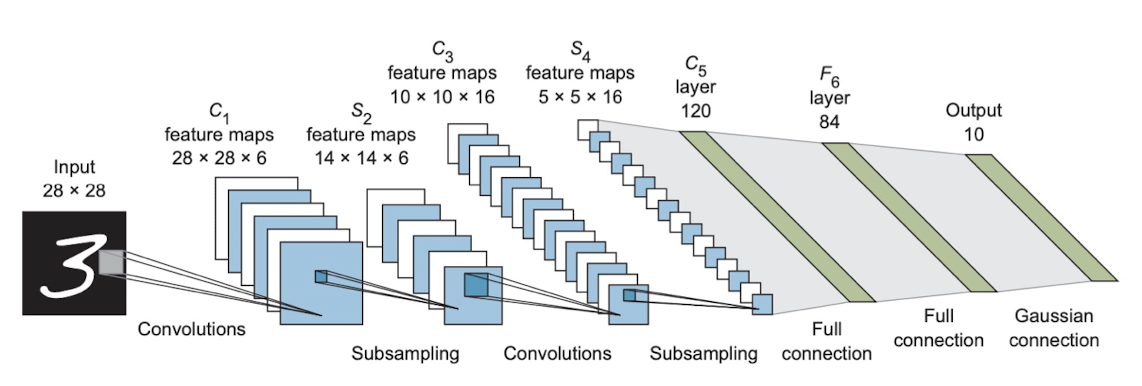
- 각 합성층의 필터 수
- 6 > 16 > 120
- 각 합성층의 커널 크기
- 5 x 5
- Pooling 층 AveragePooling
- 수용 영역 크기 : 2 x 2
- 활성화 함수 Tanh 함수
📌 AlexNet
- 알렉스크리체프스키 연구진
- LeNet이 MNIST에 대해서는 AlexNet보다는 높은 성능을 보임
- AlexNet은 MNIST보다 복잡도가 높은 이미지넷 문제 해결을 위해 제안됨
- 🏆 2012, ILSVRC
- 120만 장의 이미지, 1000 클래스
- CV에서 본격적으로 딥러닝을 최초로 도입하여 합성곱 신경망의 응용이 확산되는 계기가 되었음
- 이전에는 음성 인식 등 소수 분야에서만 딥러닝 적용되고 있었음
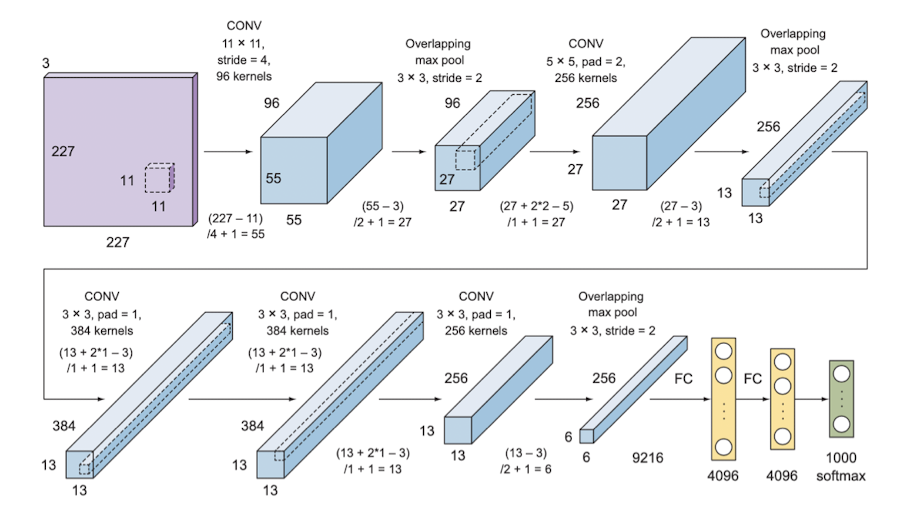
- 가중치를 가진 8개의 층
- 5개의 합성곱층
- 3개의 전결합층
- 핪성곱층의 필터 크기 : 11 x 11, 5 x 5, 3 x 3
- MaxPooling 사용
- 과적합 방지를 위한 Dropout 0.5
- Dropout을 통해 비활성화된 뉴런은 순반향 + 역전파 계산에서 모두 배제
- 뉴런 간의 상호 적응 방지
- 다양한 조합의 뉴런에 도움을 주는 유용한 특징 학습
- 활성화함수 ReLU
- 학습 시간 단축
- 기울기 소실 문제 해결
- 데이터 강화
- 국소 응답 정규화 Local response normalization
- 가중치가 빨리 수렴되도록
- BN과 다름
- 가중치 규제화
- 0.00005의 가중치 감쇠 적용
- 다중 GPU 사용
- 2개의 GPU에 신경망을 나눠 담아 학습하는 복잡한 방식
- 각 층을 두 GPU 메모리에 분리하고, GPU가 서로 통신하도록
📌 VGGNet
- 2014, 옥스퍼드 대학 VGG 연구 그룹 제안
- AlexNet보다 깊이 있는 신경망
- AlexNet보다 파라미터 개수 적음 ▶️ 연산효율성 👍
- 새로 고안된 요소 없이 LeNet과 AlexNet과 동일 (신경망 층수만 더 많음)
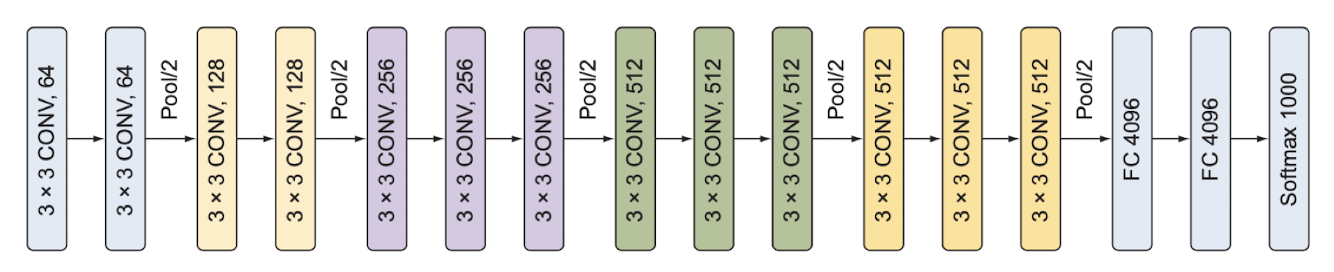
- 가중치를 가진 층 16개로 구성
- 합성곱층 13개
- 전결합층 3개
- 모든 층의 하이퍼파라미터가 동일하게 설정 > 이해하기 쉽다 !
- 신경망의 구조를 단순화시킴
- VGGNet에서 합성곱층의 필터 크기를 3 x 3으로 줄였음
- AlexNet보다 더 세밀한 특징을 추출하기 위해
⭐️ 수용영역의 크기가 같을 때
수용영역 : 출력의 한 점에 영향을 미치는 입력 이미지의 범위크기가 큰 하나의 커널보다 크기가 작은 커널을 여러 개 쌓은 쪽이 성능이 더 좋다.
커널을 여러 개 쌓으면서 비선형층을 늘리는 것 🟰 신경망의 층수를 늘리는 것
신경망의 층수를 늘리는 것과 같은 효과를 내면서 파라미터 수는 억제하여 더 낮은 비용으로 더 복잡한 특징을 학습할 수 있다.
➡️ 층수를 늘리고 합성곱 필터의 크기를 줄이면서 규제화와 같은 효과 발생 ⭐️
📌 인셉션과 GoogLeNet
- 2014, 구글 발표
-
신경망 내부적으로 계산 자원의 효율을 높였음
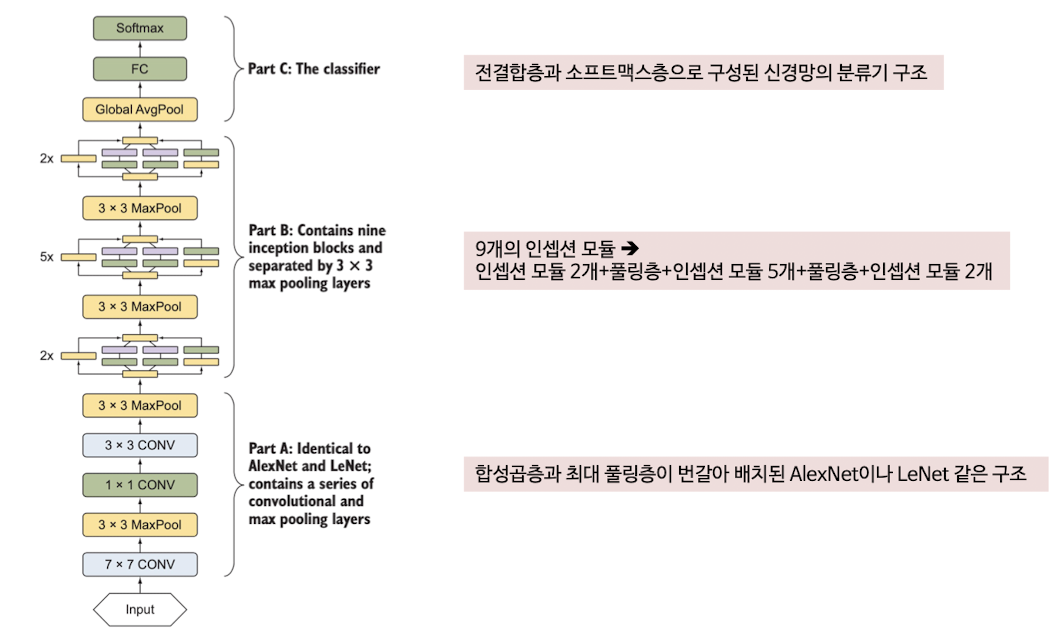
- 입셉션 신경망 구조를 구현한 GoogLeNet은 22개 층으로 구성
- VGGNet보다 층수가 많음
- 파라미터 수는 VGGNet의 1/12에 불가함
- VGGNet : 1억 3800만 개, GoogLeNet : 1300만 개
인셉션 신경망 구조
구글은 AlexNet, VGGNet에서 따온 고전적 CNN 구조 따르지만 인셉션 모듈이라는 새로운 요소 도입하였다.
기존 신경망 구조들은 각 층마다 합성곱층의 커널 크기, 풀링층의 배치 등 파라미터를 결정하기 위해 다양한 시행착오를 거쳐야했다.
인셉션에서는 이들을 직접 결정하는 대신 블록 전체에 똑같은 설정 (인셉션 모듈)을 적용했다. 이를 적용해 구성한 모델이 바로 GoogLeNet이다.
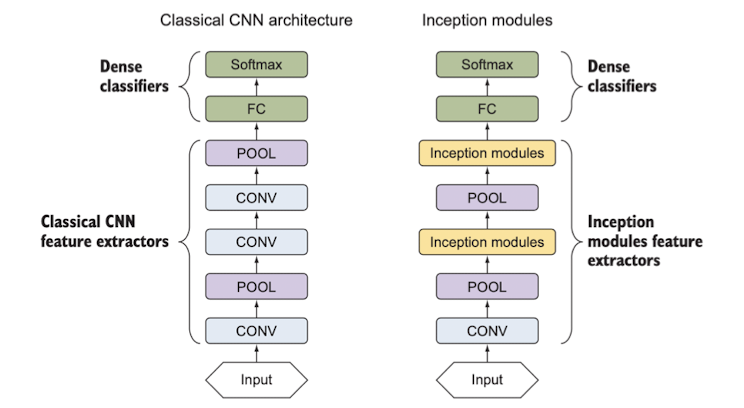
기존 방식에서는 합성곱층과 풀링층을 번갈아 쌓았다면, 인셉션 구조에서는 오른쪽과 같이 입셉션 모듈과 풀링층을 쌓아 특징 추출기를 구성하였다.
- 인셉션 모듈의 구성
- 1 x 1 합성곱층, 3 x 3 합성곱층, 5 x 5 합성곱층, 3 x 3 최대풀링층
- 각 층의 출력 ▶️ 연접 처리 cnocatenation를 통해 하나의 출력으로 합쳐짐 ▶️ 다음 단계의 입력
- 차원 축소 적용
- 단순 인셉션 모듈은 크기가 큰 필터를 포함하기 때문에 계산 비용이 큼
- 1 x 1 합성곱층을 도입하면
- 입력의 깊이를 축소하고 연산량을 줄일 수 있음
- 병목층이라고도 함
- 합성곱층 앞 / 최대풀링층 뒤
![]()
GoogLeNet 구조
📌 ResNet Residual Neural Network
- 2015, 마이크로소프트 리서치 팀 제안
- 잔차 모듈 + 스킵 연결
- 은닉층 > 강한 배치 정규화 적용
- 배치 정규화가 강하게 적용되어 복잡도를 훨씬 낮출 수 있음
- 신경망이 지나치게 깊어지면 과적합 발생
- ResNet은 배치정규화를 통해 과적합 문제 해결 💡
- 스킵 연결
- 뒤쪽의 기울기를 앞쪽 층에 직접 전달하는 별도의 경로 추가
- activation 통과하기 전 정보도 함께 넣어줌
- 항등 함수를 학습할 수 있어 층이 쌓여도 앞쪽 층보다 성능이 하락하지 않음
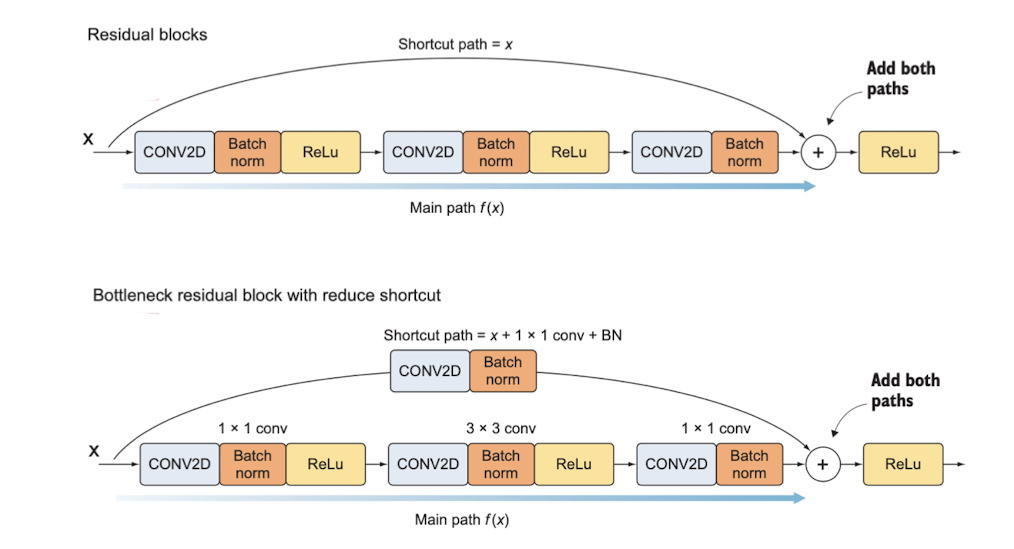
- 잔차 블록
- 합성곱층 + 스킵 연결 추가
- 잔차 블록에는 풀링층이 없음
- 주 경로와 지름길 경로로 전달되는 정보의 차원이 동일해야 연산 가능
- 지름길 경로
- 입력을 주 경로의 ReLU 입력 전으로
- 주 경로
- 일련의 합성곱 연산 및 활성화 함수
- 각 학성곱 층마다 배치 정규화 적용 ▶️ 과적합 방지 + 학습 속도 향상
- [ Conv + BN + ReLU ] x 3
Related Posts
| Summary | AI-OCR란? | |
| TIL | LDA란? - NLP Topic Modeling | |
| TIL | LeakGAN이란? - NLP Text Generation Model |
💙 You need to log in to GitHub to write comments. 💙
If you can't see comments, please refresh page(F5).